
Gambar 1. Robot XLITE yang dikembangkan oleh Komunitas Kampung Robot untuk media pembelajaran robot line-tracer analog.
Salah satu teknik di antara berbagai macam teknik yang dipergunakan pada mobile-robot otonom adalah teknik line-tracer, yaitu teknik penyusuran garis sebagai panduan jalannya robot. Robot line-tracer – atau disebut juga line-follower – ada banyak macamnya, mulai dari yang sangat sederhana hingga yang rumit. Walau hanya menyusuri garis, robot line-tracer analog atau LTA sangat menarik dan membuat banyak orang tetap penasaran. Apalagi yang sudah menggunakan pengendali-mikro (microcontroler) dan pemprograman. Maka, tak mengherankan jika perlombaan untuk kategori robot ini terus ada setiap tahun di seluruh dunia. Ada perlombaan robot yang semata-mata line-tracer seperti Robot Race atau Maze Solving, namun tak sedikit yang menggunakan prinsip line-tracer sebagai bagian dari robot yang lebih kompleks seperti pada ABU Robocon atau KRI.
Robot LTA bekerja dengan cara membedakan warna garis panduan dari warna dasarnya atau warna lantai. Biasanya warna garis dibuat kontras dengan warna dasar, seperti pada Gambar 2 warna putih untuk garis yang harus diikuti oleh robot di atas warna dasar hitam. Warna ini dapat dibuat sebaliknya dengan garis hitam di atas dasar putih.
Untuk bisa membedakan warna tersebut, robot LTA menggunakan sensor cahaya. Ada dua macam sensor cahaya yang biasa digunakan, yaitu LDR (light dependent resistor) dan dioda foto (photo-diode). LDR adalah resistor yang dapat berubah-ubah nilai resistansinya karena paparan cahaya yang mengenai permukaannya. Semakin kuat intensitas cahaya yang memaparnya, semakin rendah nilai resistansinya.

Gambar 2. Lintasan sederhana untuk robot LTA.
Warna yang terlihat oleh mata kita merupakan efek pantulan cahaya yang mengenai permukaan suatu benda. Warna putih dihasilkan oleh pantulan sempurna dari cahaya terhadap suatu permukaan, sedangkan warna hitam disebabkan tidak adanya pantulan. Zat-zat kimia tertentu dapat menghasilkan warna yang berbeda. Karakteristik inilah yang dipergunakan pada sensor garis seperti ditunjukkan oleh Gambar 3.
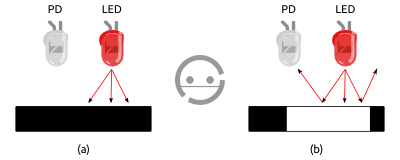
Gambar 3. (a) Bidang berwarna hitam tidak memantulkan cahaya sehingga dioda foto tidak menerima pantulan cahaya LED. (b) Bidang berwarna putih memantulkan cahaya sehingga dioda foto menerima pantulan cahaya dari LED.
Namun, kebanyakan sensor yang digunakan sekarang adalah dioda foto karena responnya terhadap perubahan cahaya yang lebih cepat dibandingkan LDR. Apalagi robot-robot line-tracer saat ini dituntut memiliki kecepatan tinggi.
Maka, apabila robot LTA menggunakan sensor dioda foto dan tepat berada di atas garis berwarna putih, dioda foto menerima pantulan cahaya dari LED dengan intensitas tertinggi sehingga nilai resistansinya terendah. Begitu robot bergerak sehingga dioda foto berpindah menyimpang dari jalur, maka nilai resistansinya naik karena tidak ada cahaya yang dipantulkan oleh lantai berwarna hitam.

Gambar 4a. Rangkaian untuk satu sensor garis. Sebuah robot LTA dapat dilengkapi dengan sedikitnya satu sensor garis, namun biasanya sepasang (dua buah) sensor garis.
Perubahan nilai resistansi ini berakibat pada perubahan besarnya tegangan yang menjadi input untuk bagian kendali/proses. Di bagian kendali/proses, robot LTA menggunakan rangkaian komparator, yaitu pembanding tegangan untuk menghasilkan dua kondisi. Kedua kondisi tersebut adalah kondisi ON dan OFF.

Gambar 4b. Rangkaian untuk satu komparator. Satu komparator dapat digunakan untuk melayani satu atau lebih sensor garis, namun keluarannya hanya satu.
Pada tahap berikutnya, dua kondisi keluaran komparator merupakan perintah bagi aktuator atau organ gerak robot LTA, yaitu motor DC untuk bekerja: berputar atau berhenti. Namun, sinyal ON atau OFF dari komparator tidak cukup untuk menggerakkan motor DC, apalagi jika tegangan motor DC lebih tinggi. Untuk keperluan ini dipasang rangkaian penggerak motor (motor driver).

Gambar 4c. Rangkaian satu penggerak motor (motor driver) yang menggunakan relay sebagai pembalik kutub tegangan baterai untuk mengubah arah putaran motor.
Rangkaian elektronika untuk membangun robot LTA yang sederhana, murah, dan mudah digambarkan pada Gambar 4. Setiap robot LTA sedikitnya menggunakan satu pasang rangkaian tersebut. Satu untuk sisi kanan dan satu lagi untuk sisi kiri. Dengan demikian, satu sensor untuk menggerakkan satu motor. Jika sensor di sebelah kanan, maka yang digerakkan adalah motor sebelah kanan. Sensor kiri untuk menggerakkan motor kiri.
Dalam praktiknya, salah satu sensor ditempatkan di atas garis dan sensor yang lain di luar garis sehingga robot bergerak mengikuti jalur melalui sisi kanan atau kirinya. Pemilihan sisi kanan atau kiri ini disebuat dengan kaidah right-hand rule atau left-hand rule. Apabila memilih sisi kanan, maka sensor kiri berada di atas garis dan sensor kanan di luar garis atau di atas warna dasar. Motor kiri berputar maju jika sensor kiri di atas garis atau lintasan, sementara motor kanan berputar maju jika sensor kanan di atas warna dasar. Jika robot berada di luar lintasan, maka ia berputar ke kiri.
Kombinasi dari sensor dan motor ini dapat menghasilkan beberapa macam arak gerak robot seperti ditunjukkan pada tabel berikut.
|
Keadaan |
Sensor Kiri |
Sensor Kanan |
Motor Kiri |
Motor Kanan |
Arah Gerak |
|
1 |
Putih |
Hitam |
Maju |
Maju |
Depan |
|
2 |
Hitam |
Hitam |
Mundur |
Maju |
Putar Kiri |
|
3 |
Putih |
Putih |
Maju |
Mundur |
Putar Kanan |
|
4 |
Hitam |
Putih |
Mundur |
Mundur |
Belakang |
Untuk robot LTA dengan jalur yang lebih sulit atau kecepatan yang lebih tinggi dibutuhkan lebih dari dua buah sensor garis. Walaupun demikian, berapapun jumlah sensornya tetap dibagi menjadi dua saja, yaitu sensor kiri dan sensor kanan karena jumlah motornya hanya dua. Gambar 5 merupakan salah satu contoh robot LTA yang menggunakan banyak sensor.

Gambar 5. LOBSTER-X, robot LTA yang dilengkapi 12 sensor dan motor kecepatan tinggi.
Kegunaan sensor dalam jumlah banyak itu adalah sebagai penyangga (buffer) pada lintasan yang sulit atau karena pengaruh kecepatan yang tinggi. Lintasan dengan belokan tajam baik berbentuk lengkung atau patahan dengan sudut lancip termasuk yang sulit bagi robot LTA. Pada kecepatan tinggi, efek kelembaman menjadikan robot tidak berhenti tepat pada belokan sehingga robot bisa keluar dari jalur. Penempatan sensor-sensor penyangga di posisi tertentu memberi dampak respon robot yang lebih akurat terhadap perubahan bentuk lintasan. Gambar 6 berikut ini adalah contoh lintasan pada lomba robot Java Robot Contest – JRC 2013 yang diselenggarakan oleh Himpunan Mahasiswa Teknik Elektronika Politeknik Elektronika Negeri Surabaya (PENS).
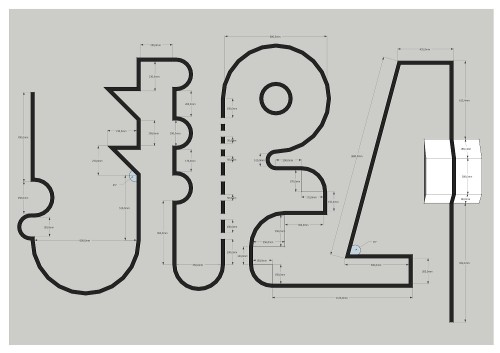
Gambar 6. Game-field atau lintasan untuk robot otonomos LTA pada JRC 2013 PENS.